Week Nine How to use RC & ESC calibration (16/June/2014 - 22/June/2014)
Arducopter Radio Control Mapping
Channel 1 = Roll
Channel 2 = Pitch
Channel 3 = Throttle
Channel 4 = Yaw
const AP_Param::GroupInfo RCMapper::var_info[] PROGMEM = {
AP_GROUPINFO("ROLL", 0, RCMapper, _ch_roll, 1),
AP_GROUPINFO("PITCH", 1, RCMapper, _ch_pitch, 2),
AP_GROUPINFO("THROTTLE", 2, RCMapper, _ch_throttle, 3),
AP_GROUPINFO("YAW", 3, RCMapper, _ch_yaw, 4),
AP_GROUPEND
};
Channel 1 = Roll
Channel 2 = Pitch
Channel 3 = Throttle
Channel 4 = Yaw
const AP_Param::GroupInfo RCMapper::var_info[] PROGMEM = {
AP_GROUPINFO("ROLL", 0, RCMapper, _ch_roll, 1),
AP_GROUPINFO("PITCH", 1, RCMapper, _ch_pitch, 2),
AP_GROUPINFO("THROTTLE", 2, RCMapper, _ch_throttle, 3),
AP_GROUPINFO("YAW", 3, RCMapper, _ch_yaw, 4),
AP_GROUPEND
};
Spektrum DX6i setting
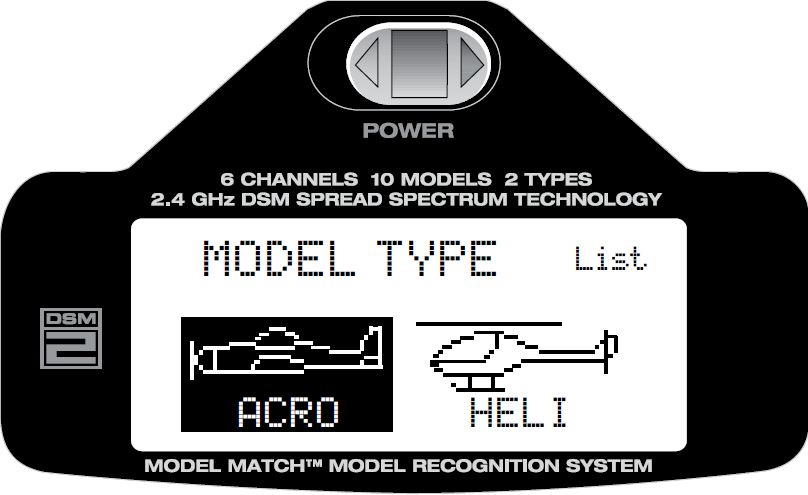
Step1: Model type selection
Selecting airplane mode
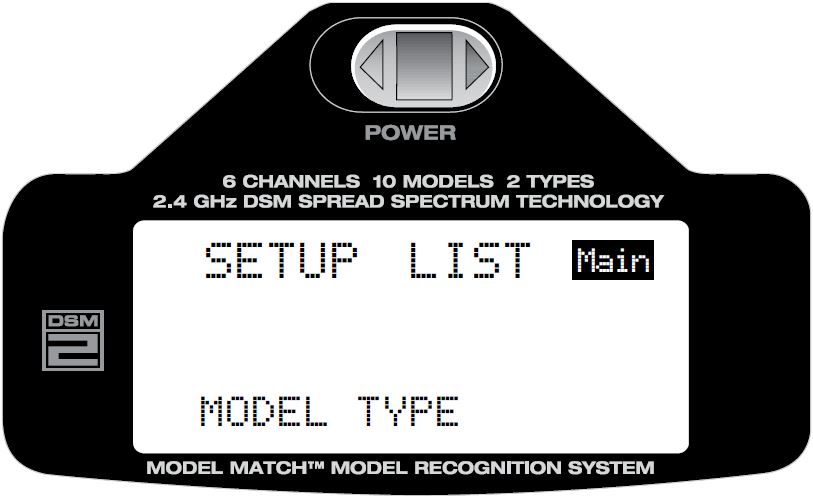
press the ROLLER and hold while turning on the transmitter. When SETUP list appears on screen, release the roller.
MODEL TYPE appears on the lower section of the screen.
press the ROLLER and hold while turning on the transmitter. When SETUP list appears on screen, release the roller.
MODEL TYPE appears on the lower section of the screen.
Rotate the roller to highlight MODEL TYPE.
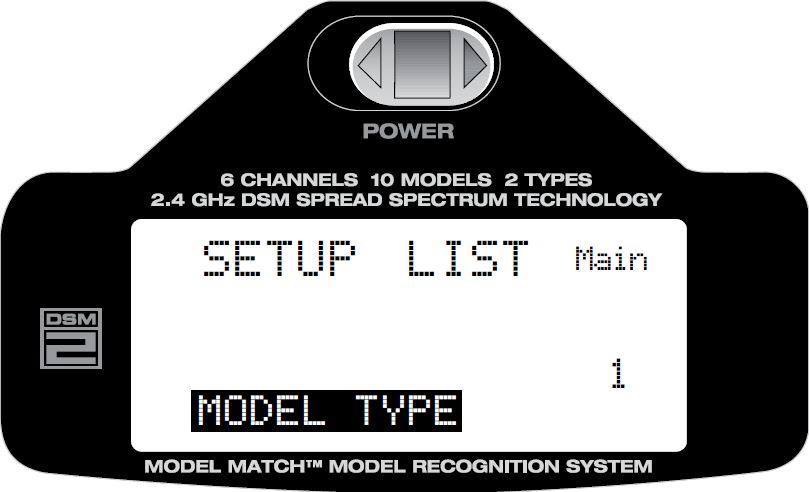
Press the ROLLER to access the MODEL TYPE function.
Step2: Servo reversing
We need to reverse some of channel in order to get a design direction. Figure below shown the reverse list, by default all the channel is in the normal position, but when we use the default setting to operate quadcopter, the pitch, yaw and roll is in the reverse direction, so we need to reverse the pitch, yaw and roll channel in the transmitter.
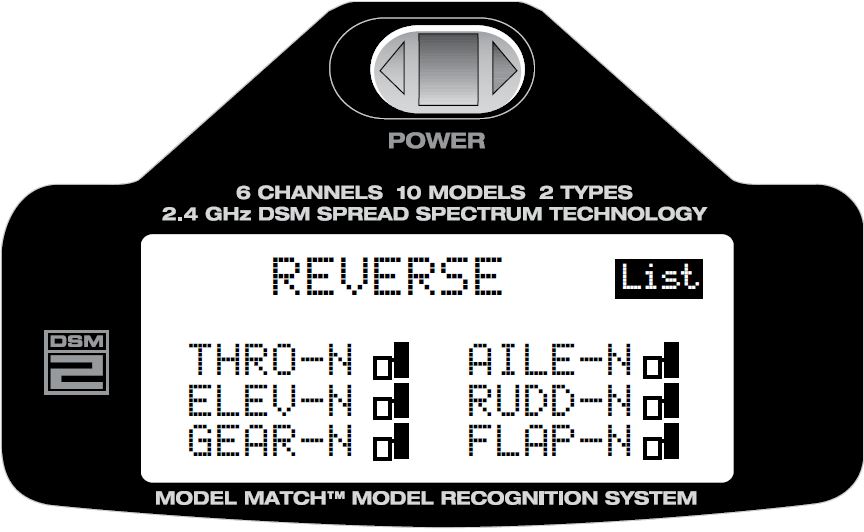
Aileron control roll
Elevator control pitch
Rudder control yaw
So change the AILE, ELEV, RUDD to the reverse position in the transmitter.
Elevator control pitch
Rudder control yaw
So change the AILE, ELEV, RUDD to the reverse position in the transmitter.
ESC (Electronic stability control) Calibration
Safety Check
Before calibrating ESCs, please ensure that your copter has NO PROPS on it and that the APM is not connected to your computer via USB. Also, make sure that the Lipo battery is disconnected.
Before calibrating ESCs, please ensure that your copter has NO PROPS on it and that the APM is not connected to your computer via USB. Also, make sure that the Lipo battery is disconnected.

Calibration
The calibration is basically teaching the ESC the range of thrust (lowest and highest power to give to each motor). It will assure equal motor startup later on.
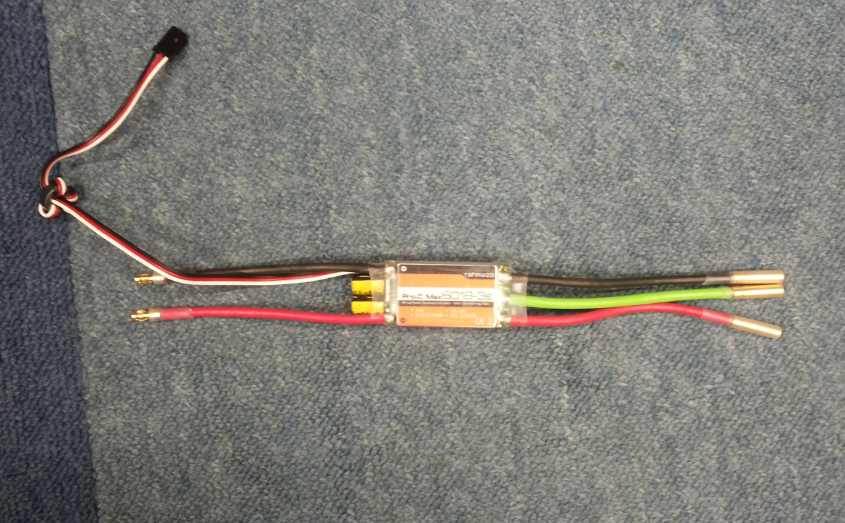
The ESC calibration must be done using same radio system that will be used on the multirotor. Throttle range should be reset whenever a new transmitter is being used. Below is ESC. Pro.C Max 6018-3s.
The calibration is basically teaching the ESC the range of thrust (lowest and highest power to give to each motor). It will assure equal motor startup later on.
The ESC calibration must be done using same radio system that will be used on the multirotor. Throttle range should be reset whenever a new transmitter is being used. Below is ESC. Pro.C Max 6018-3s.
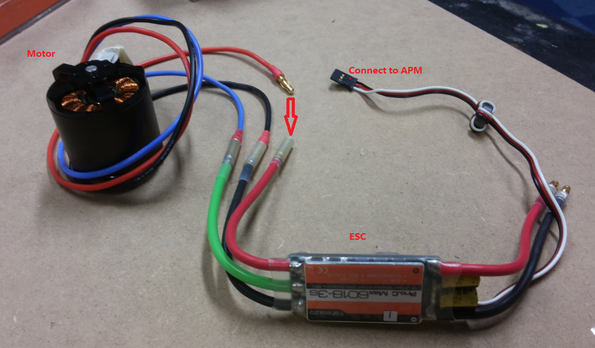
Connect ESC with motor
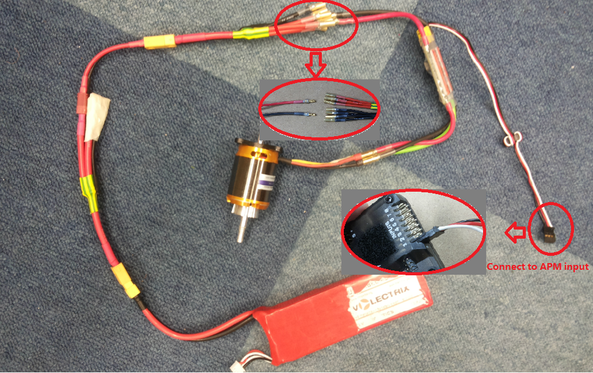
Connect ESC to battery
Normal startup procedure:
1. Moves throttle stick to bottom and the switch on transmitter.
2. Connect battery pack to ESC, special tone like “1 2 3” means power supply is OK.
3. 3 short beeps should be emitted representing the 3 cells of the lithium battery.
4. When self-test is fishing, a long tone “beep—” tone should be emitted.
5. Moves throttle stick upwards to go fly.
Remove the battery pack and connect again for throttle range setting.
Throttle range setting:
1. Switch on transmitter. Moves throttle stick to top.
2. Connect battery pack to ESC, and wait for about 2 seconds.
3. “Beep-beep-” two short tones should be emitted, means throttle range highest point has been correctly confirmed.
4. Move throttle stick to the bottom, 3 short beeps should be emitted representing the 3 cells of the lithium battery.
5. A long “beep--” tone should be emitted, means throttle range lowest point has been correctly confirmed.
How to select parameter
In the programming mode, select the parameter to program by
1. First move the throttle stick to “low” position.
2. And immediately moving the throttle stick back to “top” position.
Each time the throttle stick moves from “top” to “low” and back to ‘top’ position, the speedcontroller toggles to the next parameter.
1. Moves throttle stick to bottom and the switch on transmitter.
2. Connect battery pack to ESC, special tone like “1 2 3” means power supply is OK.
3. 3 short beeps should be emitted representing the 3 cells of the lithium battery.
4. When self-test is fishing, a long tone “beep—” tone should be emitted.
5. Moves throttle stick upwards to go fly.
Remove the battery pack and connect again for throttle range setting.
Throttle range setting:
1. Switch on transmitter. Moves throttle stick to top.
2. Connect battery pack to ESC, and wait for about 2 seconds.
3. “Beep-beep-” two short tones should be emitted, means throttle range highest point has been correctly confirmed.
4. Move throttle stick to the bottom, 3 short beeps should be emitted representing the 3 cells of the lithium battery.
5. A long “beep--” tone should be emitted, means throttle range lowest point has been correctly confirmed.
How to select parameter
In the programming mode, select the parameter to program by
1. First move the throttle stick to “low” position.
2. And immediately moving the throttle stick back to “top” position.
Each time the throttle stick moves from “top” to “low” and back to ‘top’ position, the speedcontroller toggles to the next parameter.
Parameter chart
|
Number of times Motor beeps and LED flashes1
1 2 3 4 5 |
Parameter selected for programming#1 Battery type
#1 Battery type #2 Direction of motor #3 Brake ON/OFF(Air) Governor ON/OFF(HELI) Reverse ON/OFF(Car/Boat) #4 Model Type (Air/HELI) #5 Model Type (BOAT/CAR) |
Set parameter values
Once the programmed is selected, move the throttle stick to the ‘low’ position.
The LED will indicate the current value of the parameter, either Motor beeps/LED on, or Motor beeps every 0.5 secs/ LED flashing. To change the value of the parameter.
1. Move the throttle stick to the ‘top’ position and
2. Immediately move the throttle stick back to the ‘low’ position
Once the programmed is selected, move the throttle stick to the ‘low’ position.
The LED will indicate the current value of the parameter, either Motor beeps/LED on, or Motor beeps every 0.5 secs/ LED flashing. To change the value of the parameter.
1. Move the throttle stick to the ‘top’ position and
2. Immediately move the throttle stick back to the ‘low’ position

To confirm the parameter value, move the throttle stick to ‘top’ position. In doing so, the parameter value is memorized and speedcontroller indicates the parameter that was programmed by the number of motor beeps and LED flashing.
|
Parameter Values
#1 Battery Type #2 Direction of motor #3 Brake ON/OFF(Air) Governor ON/OFF(HELI) Reverse ON/OFF(Car/Boat) ** #4 Model Type (Air/HELI) ** #5 Model Type (BOAT/CAR) |
Motor beeps and LED on
LIPO NormalOFF OFF OFF OFF AIR BOAT |
Motor beeps every 0.5 sec and LED flshing
NiCD/NiMH Reverse ON ON ON HELI CAR |
** These parameter MUST be set first before changing the other parameters.
Programming Throttle Stick position
Pro.C Max speedcontroller can be programmed for user-specified throttle stick position. The speedcontroller can be programmed for motor to start at any throttle stick position other than ‘low’ throttle stick position.
When the throttle stick position is set above the ‘low’ throttle position, the sepeedcontroller will automatically have ‘reverse’ throttle if model type is set to ‘CAR’ or ‘BOAT’ and the ‘reverse’ function is set ON.
If the speedcontroller LED turn ON during the programming Throttle Stick position sequence, ‘reverse’ the throttle channel (Refer to the transmitter manual).
Programming Throttle Stick position
Pro.C Max speedcontroller can be programmed for user-specified throttle stick position. The speedcontroller can be programmed for motor to start at any throttle stick position other than ‘low’ throttle stick position.
When the throttle stick position is set above the ‘low’ throttle position, the sepeedcontroller will automatically have ‘reverse’ throttle if model type is set to ‘CAR’ or ‘BOAT’ and the ‘reverse’ function is set ON.
If the speedcontroller LED turn ON during the programming Throttle Stick position sequence, ‘reverse’ the throttle channel (Refer to the transmitter manual).
